Simulate a time series of observations, such as acoustic detections and depth measurements, arising from simulated animal movement path(s).
Arguments
- .timeline
A
POSIXctvector of regularly spaced time stamps that defines the timeline for the simulation. This should match the.timelineused to simulate movement paths (seesim_path_walk()).- .model_obs
A named
listofdata.table::data.table. Element names should refer toModelObsstructures. Each element should be adata.table::data.tablethat defines observation model parameters (seeglossary).- .collect
A
logicalvariable that defines whether or not to collect outputs from theJuliasession inR.
Value
Patter.simulate_yobs() creates a Dict in the Julia session (named yobs).
If .collect = TRUE, sim_observations() collects the outputs in R as a named list, with one element for each sensor type, that is .model_obs element. Each element is a list of data.table::data.tables, one for each simulated path. Each row is a time step. The columns depend on the model type.
Otherwise, invisible(NULL) is returned.
Details
This function wraps Patter.simulate_yobs(). The function iterates over simulated paths defined in the Julia workspace by sim_path_walk(). For each path and time step, the function simulates observation(s). Collectively, .model_obs names and parameter data.table::data.table define the observation models used for the simulation (that is, a Vector of ModelObs instances). In Julia, simulated observations are stored in a hash table (Dict) called yobs, which is translated into a named list that is returned by R.
See also
sim_*functions implement de novo simulation of movements and observations:sim_path_walk()simulates movement path(s) (viaModelMove);sim_array()simulates acoustic array(s);sim_observations()simulates observations (viaModelObs);
Examples
if (patter_run(.julia = TRUE, .geospatial = TRUE)) {
library(data.table)
library(dtplyr)
library(dplyr, warn.conflicts = FALSE)
#### Connect to Julia
julia_connect()
set_seed()
#### Set up study system
# Define `map` (the region within which movements are permitted)
map <- dat_gebco()
set_map(map)
# Define study period
timeline <- seq(as.POSIXct("2016-01-01", tz = "UTC"),
length.out = 1000L, by = "2 mins")
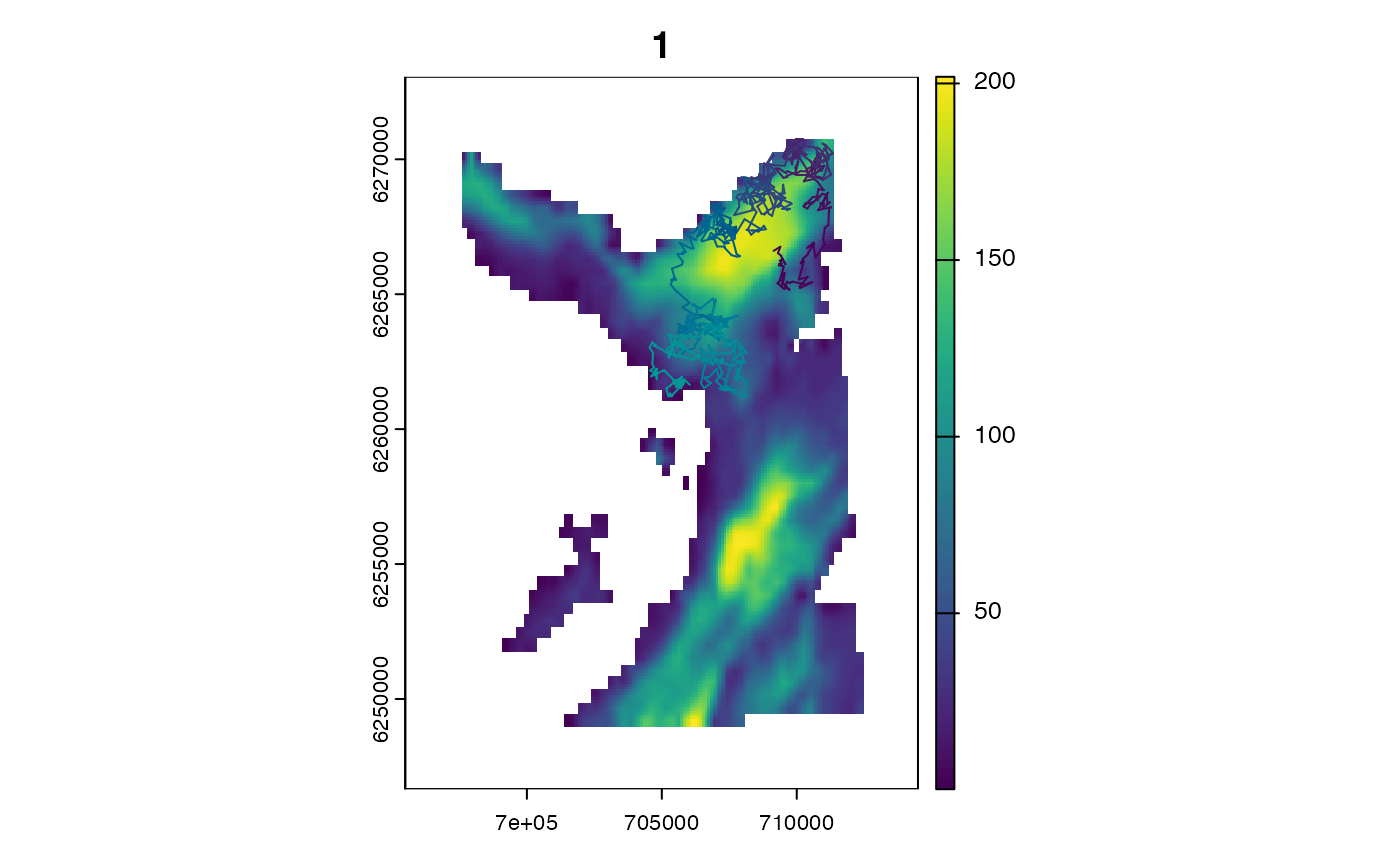
#### Simulate path with default options
paths <- sim_path_walk(.map = map,
.timeline = timeline,
.state = "StateXY",
.model_move = model_move_xy())
#### Example (1): Simulate observations via `ModelObsAcousticLogisTrunc`
# Overview:
# * `ModelObsAcousticLogisTrunc`: observation model structure for acoustic observations
# * See ?ModelObsAcousticLogisTrunc
# * See JuliaCall::julia_help("ModelObs")
# * This structure holds:
# - sensor_id (the receiver_id)
# - receiver_x, receiver_y (the receiver coordinates)
# - receiver_alpha, receiver_beta, receiver_gamma
# - (these are parameters of a truncated logistic detection probability model)
# * Using these fields, it is possible to simulate detections at receivers
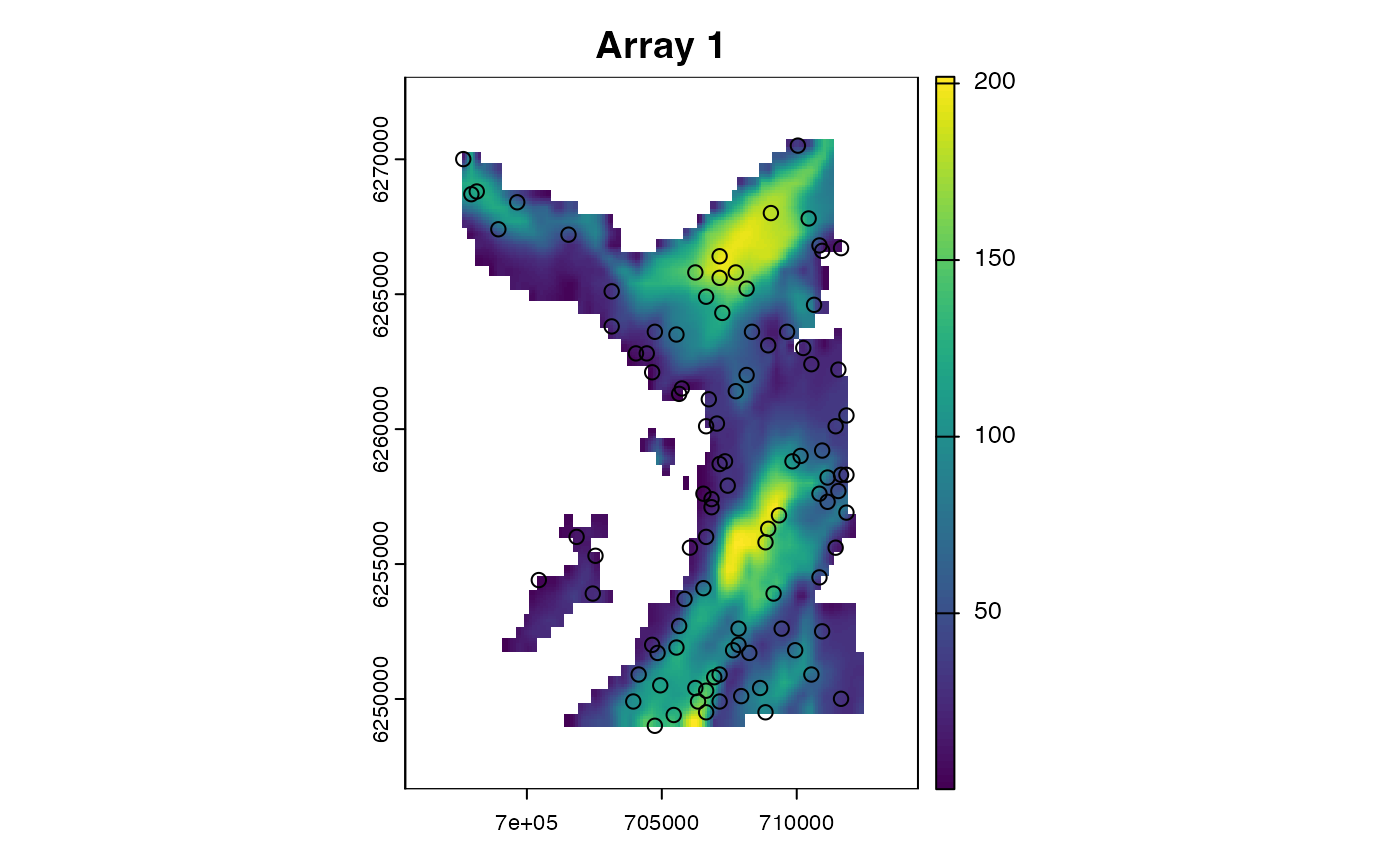
# Simulate an acoustic array
a <- 4
b <- -0.01
g <- 750
moorings <- sim_array(.map = map,
.timeline = timeline,
.n_receiver = 100L,
# (optional) Define constant detection probability parameters
.receiver_alpha = a,
.receiver_beta = b,
.receiver_gamma = g)
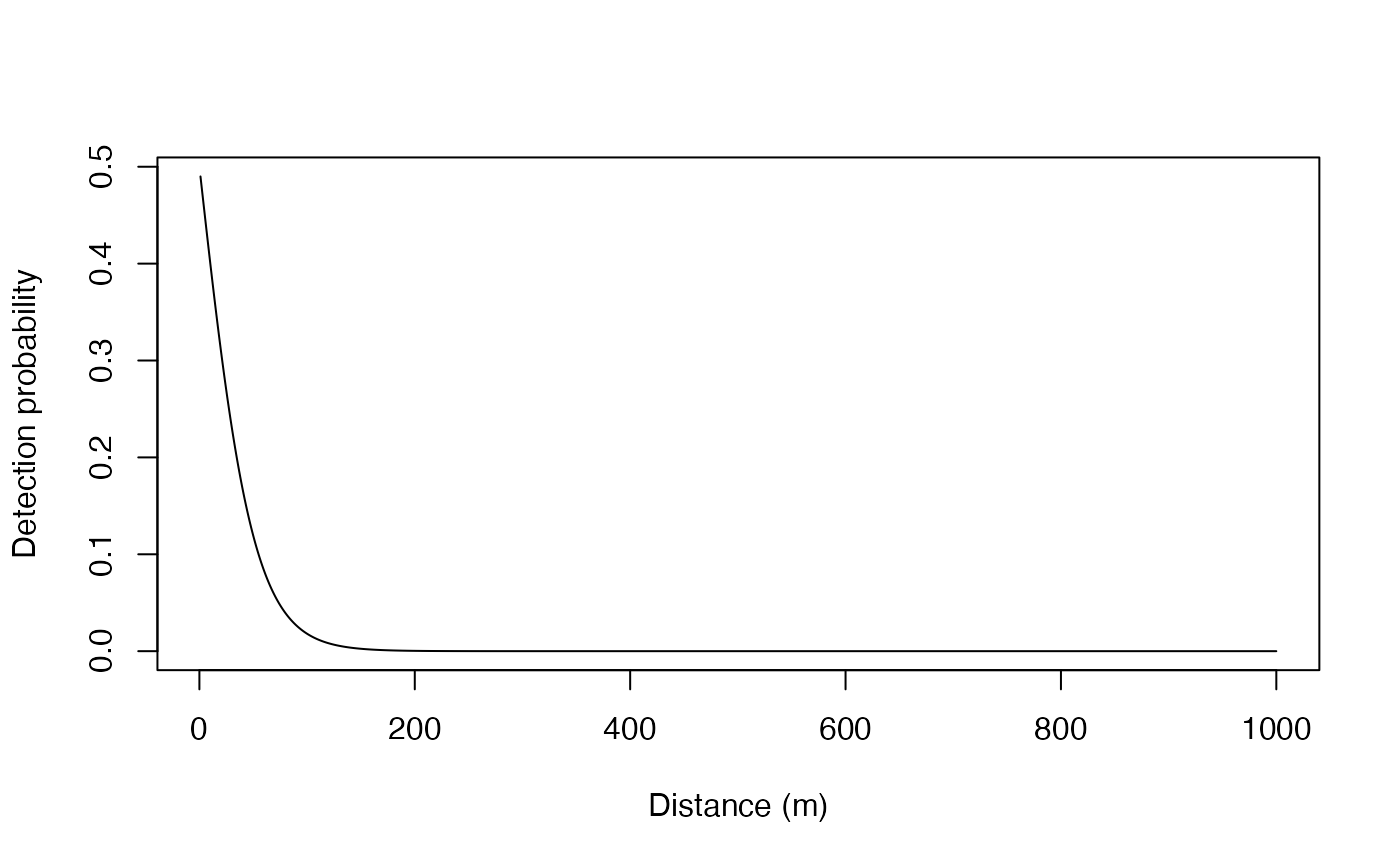
# This is the shape of detection probability model for the parameters we have chosen
d <- seq(1, 1000, by = 1)
plot(d, ifelse(d <= g, plogis(a * b * d), 0),
ylab = "Detection probability",
xlab = "Distance (m)",
type = "l")
# Define a data.table of observation model parameters
moorings <-
moorings |>
select(sensor_id = "receiver_id",
"receiver_x", "receiver_y",
"receiver_alpha", "receiver_beta", "receiver_gamma") |>
as.data.table()
# Simulate observations
obs <- sim_observations(.timeline = timeline,
.model_obs = list(ModelObsAcousticLogisTrunc = moorings))
# Examine simulated observations
# * sim_observations() returns a list, with one element for every `.model_obs`
# * Each element is a `list`, with one element for each simulated path
# * Each element is a [`data.table::data.table`] that contains the observations
str(obs)
# Plot detections
detections <-
obs$ModelObsAcousticLogisTrunc[[1]] |>
lazy_dt() |>
filter(obs == 1L) |>
as.data.table()
plot(detections$timestamp, detections$obs)
# Customise `ModelObsAcousticLogisTrunc` parameters
# > Receiver-specific parameters are permitted
moorings[, receiver_alpha := runif(.N, 4, 5)]
moorings[, receiver_beta := runif(.N, -0.01, -0.001)]
moorings[, receiver_gamma := runif(.N, 500, 1000)]
obs <- sim_observations(.timeline = timeline,
.model_obs = list(ModelObsAcousticLogisTrunc = moorings))
#### Example (2): Simulate observations via `ModelObsDepthUniformSeabed`
# `ModelObsDepthUniformSeabed` is an observation model for depth observations
# * See ?ModelObsAcousticLogisTrunc
# * See JuliaCall::julia_help("ModelObsAcousticLogisTrunc")
pars <- data.frame(sensor_id = 1,
depth_shallow_eps = 10,
depth_deep_eps = 20)
obs <- sim_observations(.timeline = timeline,
.model_obs = list(ModelObsDepthUniformSeabed = pars))
#### Example (3): Simulate observations via `ModelObsDepthNormalTruncSeabed`
# `ModelObsDepthNormalTruncSeabed` is an observation model for depth observations
pars <- data.frame(sensor_id = 1,
depth_sigma = 10,
depth_deep_eps = 20)
obs <- sim_observations(.timeline = timeline,
.model_obs = list(ModelObsDepthNormalTruncSeabed = pars))
#### Example (4): Simulate observations via custom `ModelObs` sub-types
# See `?ModelObs`
#### Example (5): Use multiple observation models
obs <- sim_observations(.timeline = timeline,
.model_obs = list(ModelObsAcousticLogisTrunc = moorings,
ModelObsDepthNormalTruncSeabed = pars))
str(obs)
}
#> `patter::julia_connect()` called @ 2025-04-22 09:32:18...
#> ... Running `Julia` setup via `JuliaCall::julia_setup()`...
#> ... Validating Julia installation...
#> ... Setting up Julia project...
#> ... Handling dependencies...
#> ... `Julia` set up with 11 thread(s).
#> `patter::julia_connect()` call ended @ 2025-04-22 09:32:18 (duration: ~0 sec(s)).
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
 #> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> List of 1
#> $ ModelObsAcousticLogisTrunc:List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 100000 obs. of 8 variables:
#> .. ..$ timestamp : POSIXct[1:100000], format: "2016-01-01 00:00:00" "2016-01-01 00:00:00" ...
#> .. ..$ obs : int [1:100000] 0 0 0 0 0 0 0 0 0 0 ...
#> .. ..$ sensor_id : int [1:100000] 1 2 3 4 5 6 7 8 9 10 ...
#> .. ..$ receiver_x : num [1:100000] 709142 698042 708442 709942 701642 ...
#> .. ..$ receiver_y : num [1:100000] 6266607 6267507 6266307 6255107 6265107 ...
#> .. ..$ receiver_alpha: num [1:100000] 4 4 4 4 4 4 4 4 4 4 ...
#> .. ..$ receiver_beta : num [1:100000] -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 ...
#> .. ..$ receiver_gamma: num [1:100000] 750 750 750 750 750 750 750 750 750 750 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> List of 1
#> $ ModelObsAcousticLogisTrunc:List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 100000 obs. of 8 variables:
#> .. ..$ timestamp : POSIXct[1:100000], format: "2016-01-01 00:00:00" "2016-01-01 00:00:00" ...
#> .. ..$ obs : int [1:100000] 0 0 0 0 0 0 0 0 0 0 ...
#> .. ..$ sensor_id : int [1:100000] 1 2 3 4 5 6 7 8 9 10 ...
#> .. ..$ receiver_x : num [1:100000] 709142 698042 708442 709942 701642 ...
#> .. ..$ receiver_y : num [1:100000] 6266607 6267507 6266307 6255107 6265107 ...
#> .. ..$ receiver_alpha: num [1:100000] 4 4 4 4 4 4 4 4 4 4 ...
#> .. ..$ receiver_beta : num [1:100000] -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 -0.01 ...
#> .. ..$ receiver_gamma: num [1:100000] 750 750 750 750 750 750 750 750 750 750 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>
 #> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> List of 2
#> $ ModelObsAcousticLogisTrunc :List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 100000 obs. of 8 variables:
#> .. ..$ timestamp : POSIXct[1:100000], format: "2016-01-01 00:00:00" "2016-01-01 00:00:00" ...
#> .. ..$ obs : int [1:100000] 0 0 0 0 0 0 0 0 0 0 ...
#> .. ..$ sensor_id : int [1:100000] 1 2 3 4 5 6 7 8 9 10 ...
#> .. ..$ receiver_x : num [1:100000] 709142 698042 708442 709942 701642 ...
#> .. ..$ receiver_y : num [1:100000] 6266607 6267507 6266307 6255107 6265107 ...
#> .. ..$ receiver_alpha: num [1:100000] 4.39 4.71 4.11 4.27 4.59 ...
#> .. ..$ receiver_beta : num [1:100000] -0.00438 -0.0074 -0.0082 -0.00279 -0.00345 ...
#> .. ..$ receiver_gamma: num [1:100000] 555 984 693 929 944 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>
#> $ ModelObsDepthNormalTruncSeabed:List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 1000 obs. of 5 variables:
#> .. ..$ timestamp : POSIXct[1:1000], format: "2016-01-01 00:00:00" "2016-01-01 00:02:00" ...
#> .. ..$ obs : num [1:1000] 40.2 34.9 41.9 58.5 41.3 ...
#> .. ..$ sensor_id : int [1:1000] 1 1 1 1 1 1 1 1 1 1 ...
#> .. ..$ depth_sigma : num [1:1000] 10 10 10 10 10 10 10 10 10 10 ...
#> .. ..$ depth_deep_eps: num [1:1000] 20 20 20 20 20 20 20 20 20 20 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> Warning: Use `seq.POSIXt()` with `from`, `to` and `by` rather than `length.out` for faster handling of time stamps.
#> List of 2
#> $ ModelObsAcousticLogisTrunc :List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 100000 obs. of 8 variables:
#> .. ..$ timestamp : POSIXct[1:100000], format: "2016-01-01 00:00:00" "2016-01-01 00:00:00" ...
#> .. ..$ obs : int [1:100000] 0 0 0 0 0 0 0 0 0 0 ...
#> .. ..$ sensor_id : int [1:100000] 1 2 3 4 5 6 7 8 9 10 ...
#> .. ..$ receiver_x : num [1:100000] 709142 698042 708442 709942 701642 ...
#> .. ..$ receiver_y : num [1:100000] 6266607 6267507 6266307 6255107 6265107 ...
#> .. ..$ receiver_alpha: num [1:100000] 4.39 4.71 4.11 4.27 4.59 ...
#> .. ..$ receiver_beta : num [1:100000] -0.00438 -0.0074 -0.0082 -0.00279 -0.00345 ...
#> .. ..$ receiver_gamma: num [1:100000] 555 984 693 929 944 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>
#> $ ModelObsDepthNormalTruncSeabed:List of 1
#> ..$ :Classes ‘data.table’ and 'data.frame': 1000 obs. of 5 variables:
#> .. ..$ timestamp : POSIXct[1:1000], format: "2016-01-01 00:00:00" "2016-01-01 00:02:00" ...
#> .. ..$ obs : num [1:1000] 40.2 34.9 41.9 58.5 41.3 ...
#> .. ..$ sensor_id : int [1:1000] 1 1 1 1 1 1 1 1 1 1 ...
#> .. ..$ depth_sigma : num [1:1000] 10 10 10 10 10 10 10 10 10 10 ...
#> .. ..$ depth_deep_eps: num [1:1000] 20 20 20 20 20 20 20 20 20 20 ...
#> .. ..- attr(*, ".internal.selfref")=<externalptr>